Active Learning/Adaptive Sampling¶
The active learning/adaptive sampling is used to create a feedback loop between the deep learning model and VRM simulator. This enables faster training convergence as the model generates a set of process parameters based on the regions that have maximum uncertainty. This is done iteratively till the model performance on unseen data is above the set threshold. Given training sample generation from the multi-fidelity simulator is a time taking computation heavy process the active learning strategy has significant impact on reduction of computation resources and time. The aim of this is to have a continuous learning system that can adapt to dynamic changes within a system and learn continuously so that model performance does not diminish with time.
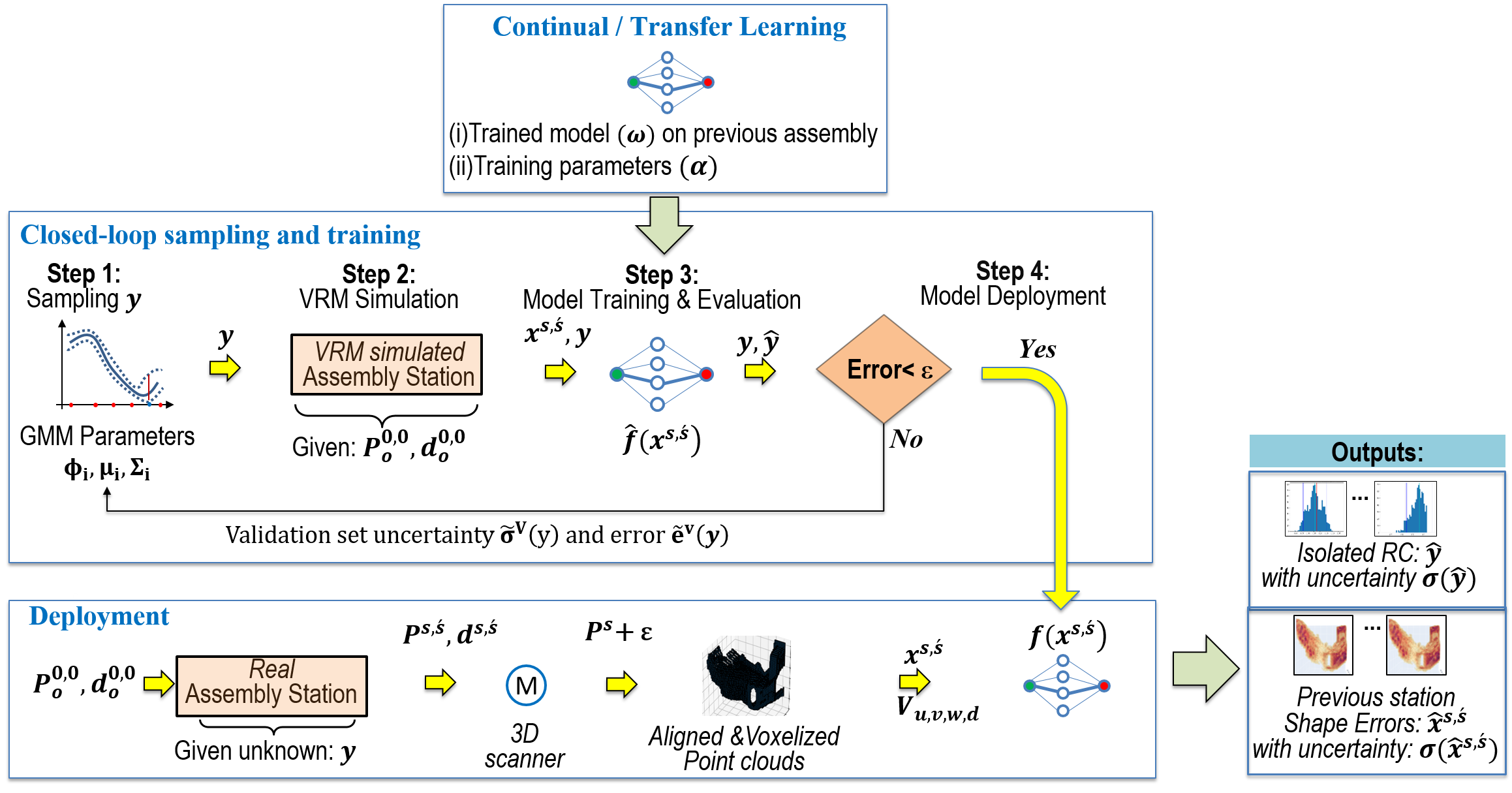
Fig 1: Active learning strategy for faster training¶
-
class
dlmfg.active_learning.sampling_system.AdaptiveSampling(sample_dim, sample_type, adaptive_samples_dim, adaptive_runs)[source]¶ Assembly System Class
- Parameters
sample_dim (str (required)) – The number of initial samples to be generated
sample_type – Type of sampling to be used for generating initial samples
adaptive_sample_dim (int (required)) – The number of samples to be generated with each adaptive sample run
adaptive_runs (int (required)) – The maximum number of adaptive runs to be conducted
-
adpative_samples_gen(kcc_struct, run_id)[source]¶ Adaptive samples based on model uncertainty, currently this is Work in Progress
-
inital_sampling_lhs(kcc_struct, sample_dim)[source]¶ Generates multi-variate LHS samples for each KCC and scales then based on the KCC maximum and minimum value
- Parameters
kcc_struct – list of dictionaries for each KCC from kcc_config file
sample_dim (int (required)) – The number of initial samples to be generated
- Returns
numpy array of sampled KCCs
- Return type
numpy.array [sample_dim*kcc_dim]
-
inital_sampling_uniform_random(kcc_struct, sample_dim)[source]¶ Generates multi-variate uniform random samples for each KCC and scales then based on the KCC maximum and minimum value
- Parameters
kcc_struct – list of dictionaries for each KCC from kcc_config file
sample_dim (int (required)) – The number of initial samples to be generated
- Returns
numpy array of sampled KCCs
- Return type
numpy.array [sample_dim*kcc_dim]
-
dlmfg.active_learning.sampling_system.parentdir= 'C:\\Users\\sinha_s\\Desktop\\dlmfg_package\\dlmfg'¶ Contains sampling classes and methods to enable active learning between VRM and 3D CNN model