Deep Reinforcement Learning for Control and Correction¶
Overview
For control and correction of manufacturing systems the library implements the Object Shape Error Correction (OSEC) methodology using Deep Deterministic Policy Gradients (DDPG). The methodology aims to correct root causes in manufacturing system considering a variety of system costs and constraints. Notebooks for implementation of DDPG using a custom made assembly Matlab environment and TensorFlow based DDPG agent and learning is located within Deep Reinforcement Learning Module of the library
Matlab Python Linking code - Enables low latency integration between Multi-physics environments (Computer Aided Engineering (CAE)) in Matlab and TensorFlow based deep learning agents
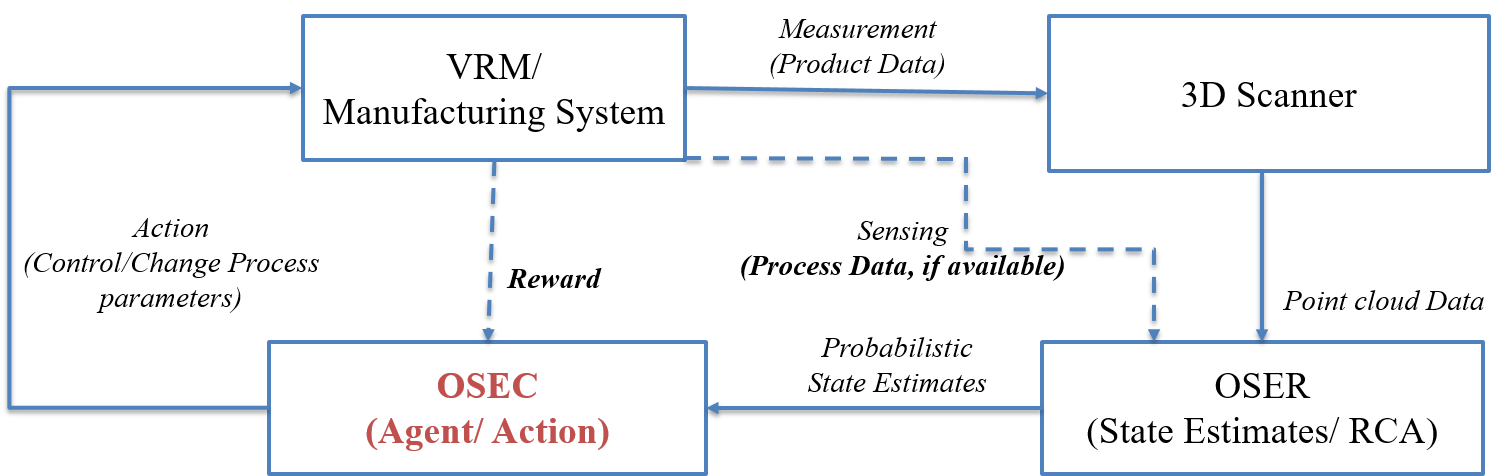
Fig 1: Object Shape Error Correction Framework¶
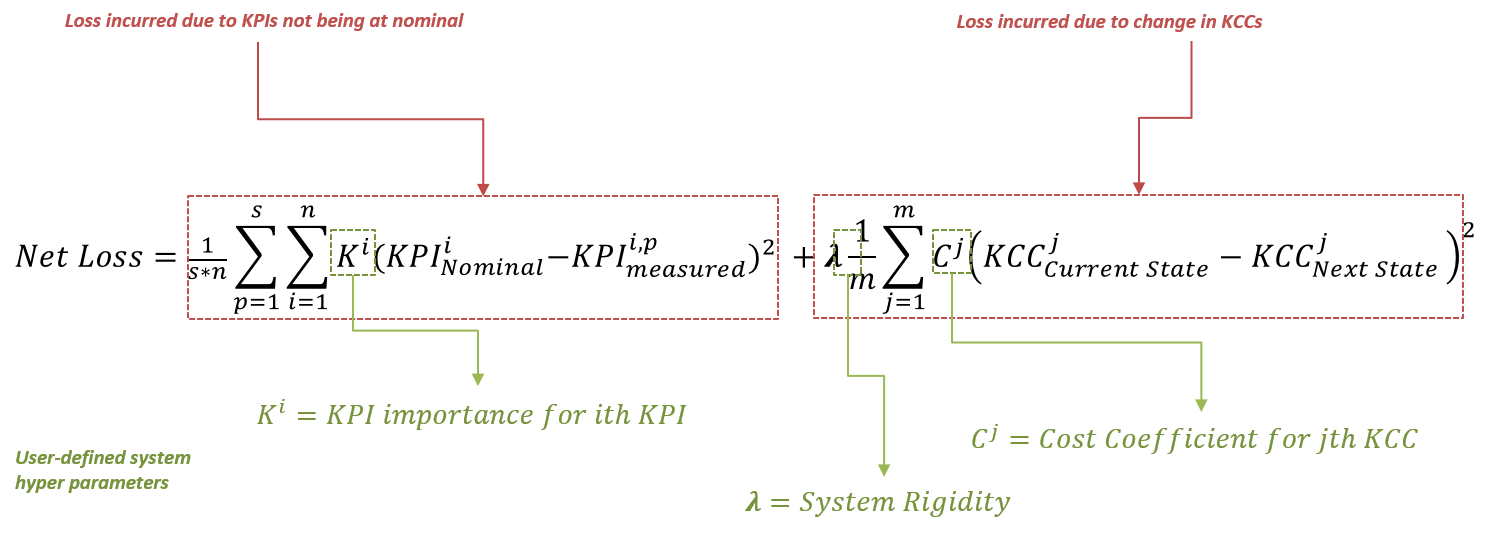
Fig 1: Object Shape Error Correction Objective¶